Examples
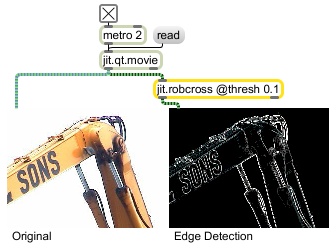
Robert's Cross edge detection
| Name | IOProc | Planelink | Typelink | Dimlink | Plane | Dim | Type |
| out | n/a | 1 | 1 | 1 | 1 | 1 | char long float32 float64 |
| Name | Type | g/s | Description |
|---|---|---|---|
| thresh | float | Edge detection threshold (default 0.). Cell values below this threshold are set to 0. |
| Name | Description |
|---|---|
| jit.brass | Emboss image |
| jit.qt.effect | QuickTime Effects for Jitter matrices |
| jit.sobel | Sobel and Prewitt gradient edge detector |
| Tutorial 45: Introduction to using Jitter within JavaScript | Tutorial 45: Introduction to using Jitter within JavaScript |