jit.phys.body
Description
The jit.phys.body object represents a rigid body and collision shape in a physics simulation. The collision shape is either one of several simple shapes, a compound shape (combination of simple shapes), or defined by a matrix of vertices.
Examples
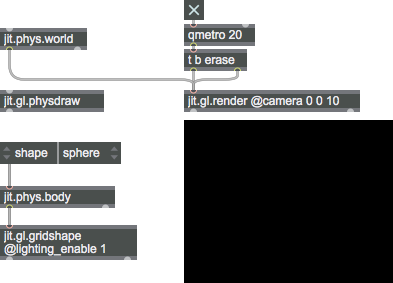
Discussion
Shapes defined by a mesh of vertices include convexhull , concave , and dynamicmesh . Each of these shapes require a 3 plane, float32, 1D or 2D matrix passed in. If the vertex matrix is 1D it's interpreted as a triangle mesh, if 2D it's interpreted as a tri_grid mesh.
Attributes
anim [symbol]
The name of a jit.anim.node object to receive transform updates from.
collisions [int]
Enables and disables collision reporting out the second (dumpout) outlet.
damping [2 floats]
Set the linear and angular damping applied to a body in the range 0. to 1. (default 0.2 0.2). Damping can be used to simulate air resistance.
enable [int]
Enable this body in the physics simulation (default = 1).
enable_sleep [int]
Enable sleeping on this body, causing deactivation when linear and angular velocity are 0 (default = 0).
filterclass [symbol]
Set the name of this object's collision filter-class (default = default). Other objects must specify the filterclass name in their filters list to enable collisions with this object. Maximum allowed unique names is 10.
filters [10 symbols]
Specify a list of filterclass names to enable collisions with (default = all). Possible values include all , worldbox , and default . Additional values include any user-specified filterclass names (maximum allowed = 10).
force [3 floats]
Apply a force to the rigid body using a 3D worldspace vector (default = 0 0 0). If forces_relative is enabled, the vector is converted to object space.
forces_relative [int]
Forces relative flag will cause all forces to be converted to object space before applying (default = 0).
friction [float]
The friction amount (opposite force) (default = 0.5). Applied when the body is in contact with another body that has friction.
kinematic [int]
Kinematic flag (default = 0). Use this mode to disable dynamics on the body, maintain collisions with other bodies in the world, and animate using position and quat attributes. This allows for a user-animated rigid-body.
local_scaling [int]
Local scaling flag (default = 0). When enabled, the scale attribute will apply a local scaling transform to the collision shape. When disabled, the rigid-body is removed and re-added to the physics world for every scale modification.
mass [float]
Body mass (default = 1.). When set to 0. body dynamics are disabled, however collisions remain active.
name [symbol]
Specifies the name of the instance (default = UID).
position [3 floats]
Body position in worldspace in the form x y z (default = 0. 0. 0.).
quat [4 floats]
Body orientation as a quaternion in the form x y z w (default = 0. 0. 0. 1.).
reduce_hull [int]
Enable automatic vertex reduction when body shape attribute is set to (default = 1).
resetpos [3 floats]
Body reset position in the form x y z (default = 0. 0. 0.). This is the worldspace position the body will return to upon receiving the message.
resetquat [4 floats]
Body reset orientation as a quaternion in the form x y z w (default = 0. 0. 0. 1.). This is the orientation the body will return to upon receiving the message.
restitution [float]
Restitution value, or bounciness (default = 0.1). The proportion of kinetic energy preserved on impact with other rigid bodies.
rolling_friction [float]
The rolling friction amount (opposite force for a rolling object) (default = 0.0). Applied when the body is in contact with another body that has friction.
rotate [4 floats]
Body orientation as angle-axis in the form angle(in degrees) x y z (default = 0. 0. 0. 1.).
rotate_order [symbol]
Sets the order of rotations that are applied to the rotatexyz attribute for all child gl objects (default = auto). E.G. if set to xyz , the object is first rotated around its X axis, then Y, and finally Z. The default value, 'auto', implements yzx ordering. To replicate Max 5, use zyx . If an ob3d is bound, this will override the rotate_order inherited from its jit.gl.render context.
Possible values:
'auto'
'xyz'
'xzy'
'yxz'
'yzx'
'zxy'
'zyx'
rotatexyz [3 floats]
Body orientation as Euler angles (in degrees) in the form x y z (default = 0. 0. 0.).
scale [3 floats]
The body scaling factor in the form x y z (default = 1. 1. 1.).
send_scale [int]
Send scale flag (default = 1). When enabled, scale values will be sent to bound objects.
shape [symbol]
Collision shape type (default = sphere).
Possible values:
'sphere'
'cube'
'capsule'
'cone'
'cylinder'
'convexhull'
(
Requires a matrix of vertices. A convex hull is generated that encloses the vertices.
)
'concave'
(
Requires a matrix of vertices. A concave shape is generated, allowing for hollows in the mesh shape
)
'compound'
(
Composite of simple shapes
)
'dynamicmesh'
(
Requires a matrix of vertices. Handles dynamically changing mesh shapes and requires a non-moving rigid body.
)
targetname [symbol]
The name of a target object, either an OpenGL object or a jit.anim.node. This object will receive position, quat, and possibly scale values.
torque [3 floats]
Apply a torque (angular force) to the rigid body using a 3D worldspace vector (default = 0 0 0).
total_force [3 floats]
The total force currently applied to the rigid-body.
total_torque [3 floats]
The total torque currently applied to the rigid-body.
velocity [3 floats]
The current rigid-body velocity in units per second (default = 0 0 0).
velocity_ang [3 floats]
The current rigid-body angular velocity in radians per second (default = 0 0 0).
worldname [symbol]
The name of a jit.phys.world context this body is bound to.
Common Box Attributes
annotation [symbol]
Sets the text that will be displayed in the Clue window when the user moves the mouse over the object.
background [int] (default: 0)
Adds or removes the object from the patcher's background layer. adds the object to the background layer, removes it. Objects in the background layer are shown behind all objects in the default foreground layer.
color [4 floats]
Sets the color for the object box outline.
fontface [int]
Sets the type style used by the object. The options are:
plain
bold
italic
bold italic
Possible values:
0 = 'regular'
1 = 'bold'
2 = 'italic'
3 = 'bold italic'
fontname [symbol]
Sets the object's font.
fontsize [float]
Sets the object's font size (in points).
Possible values:
'8'
'9'
'10'
'11'
'12'
'13'
'14'
'16'
'18'
'20'
'24'
'30'
'36'
'48'
'64'
'72'
hidden [int] (default: 0)
Toggles whether an object is hidden when the patcher is locked.
hint [symbol]
Sets the text that will be displayed in as a pop-up hint when the user moves the mouse over the object in a locked patcher.
ignoreclick [int] (default: 0)
Toggles whether an object ignores mouse clicks in a locked patcher.
jspainterfile [symbol]
JS Painter File
patching_rect [4 floats] (default: 0. 0. 100. 0.)
Sets the position and size of the object in the patcher window.
position [2 floats]
Sets the object's x and y position in both patching and presentation modes (if the object belongs to its patcher's presentation), leaving its size unchanged.
presentation [int] (default: 0)
Sets whether an object belongs to the patcher's presentation.
presentation_rect [4 floats] (default: 0. 0. 0. 0.)
Sets the x and y position and width and height of the object in the patcher's presentation, leaving its patching position unchanged.
rect [4 floats]
Sets the x and y position and width and height of the object in both patching and presentation modes (if the object belongs to its patcher's presentation).
size [2 floats]
Sets the object's width and height in both patching and presentation modes (if the object belongs to its patcher's presentation), leaving its position unchanged.
textcolor [4 floats]
Sets the color for the object's text in RGBA format.
textjustification [int]
Sets the justification for the object's text.
Possible values:
0 = 'left'
1 = 'center'
2 = 'right'
varname [symbol]
Sets the patcher's scripting name, which can be used to address the object by name in pattr, scripting messages to thispatcher, and the js object.
Messages
bang
addchild
Arguments
x [float]
y [float]
z [float]
quat-x [float]
quat-y [float]
quat-z [float]
quat-w [float]
scale-x [float]
scale-y [float]
scale-z [float]
getchild_dict
impulse
Arguments
y [float]
z [float]
relative-x [float]
relative-y [float]
relative-z [float]
removechild
Arguments
removechildren
reset
setchild_position
Arguments
x [float]
y [float]
z [float]
setchild_quat
Arguments
x [float]
y [float]
z [float]
w [float]
setchild_scale
Arguments
x [float]
y [float]
z [float]
setchild_shape
Arguments
shape [symbol]
setresetstate
torque_impulse
Arguments
y [float]
z [float]
See Also
| Name | Description |
|---|---|
| Working with OpenGL | Working with OpenGL |
| jit.phys.world | Collision detection and rigid body dynamics |
| jit.phys.multiple | Uses matrices to simulate multiple rigid bodies |
| jit.phys.picker | Constraint picking in a physics world |
| jit.gl.physdraw | A physics opengl debug drawer |
| jit.gl.gridshape | Generate simple geometric shapes as a grid |