jit.quat
Description
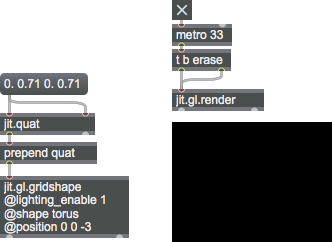
jit.quat will perform quaternion multiplication, with optional normalization of the input quaternions. In relation to 3D transforms, quaternion multiplication is the concatenation of two orientations. Jitter quaternions are ordered X Y Z W.
Examples
Discussion
A quaternion is a mathematical construct that is a four dimensional vector, and can be visualized as a rotation around an arbitrary axis. Quaternions are a useful representation of an orientation in 3D space.
Attributes
inverse [4 floats]
The output quaternion's opposite rotation.
normalize [int]
Determines whether or not the input quaternions are normalized before the multiplication. (default = 0)
quat1 [4 floats]
Sets the first operand (default = 0 0 0 1)
quat2 [4 floats]
Sets the second operand (default = 0 0 0 1)
quatout [4 floats]
The resulting quaternion after the multiplication
xaxis [3 floats]
the output quaternion's rotation matrix X axis.
yaxis [3 floats]
the output quaternion's rotation matrix Y axis.
zaxis [3 floats]
the output quaternion's rotation matrix Z axis.
Common Box Attributes
annotation [symbol]
Sets the text that will be displayed in the Clue window when the user moves the mouse over the object.
background [int] (default: 0)
Adds or removes the object from the patcher's background layer. adds the object to the background layer, removes it. Objects in the background layer are shown behind all objects in the default foreground layer.
color [4 floats]
Sets the color for the object box outline.
fontface [int]
Sets the type style used by the object. The options are:
plain
bold
italic
bold italic
Possible values:
0 = 'regular'
1 = 'bold'
2 = 'italic'
3 = 'bold italic'
fontname [symbol]
Sets the object's font.
fontsize [float]
Sets the object's font size (in points).
Possible values:
'8'
'9'
'10'
'11'
'12'
'13'
'14'
'16'
'18'
'20'
'24'
'30'
'36'
'48'
'64'
'72'
hidden [int] (default: 0)
Toggles whether an object is hidden when the patcher is locked.
hint [symbol]
Sets the text that will be displayed in as a pop-up hint when the user moves the mouse over the object in a locked patcher.
ignoreclick [int] (default: 0)
Toggles whether an object ignores mouse clicks in a locked patcher.
jspainterfile [symbol]
JS Painter File
patching_rect [4 floats] (default: 0. 0. 100. 0.)
Sets the position and size of the object in the patcher window.
position [2 floats]
Sets the object's x and y position in both patching and presentation modes (if the object belongs to its patcher's presentation), leaving its size unchanged.
presentation [int] (default: 0)
Sets whether an object belongs to the patcher's presentation.
presentation_rect [4 floats] (default: 0. 0. 0. 0.)
Sets the x and y position and width and height of the object in the patcher's presentation, leaving its patching position unchanged.
rect [4 floats]
Sets the x and y position and width and height of the object in both patching and presentation modes (if the object belongs to its patcher's presentation).
size [2 floats]
Sets the object's width and height in both patching and presentation modes (if the object belongs to its patcher's presentation), leaving its position unchanged.
textcolor [4 floats]
Sets the color for the object's text in RGBA format.
textjustification [int]
Sets the justification for the object's text.
Possible values:
0 = 'left'
1 = 'center'
2 = 'right'
varname [symbol]
Sets the patcher's scripting name, which can be used to address the object by name in pattr, scripting messages to thispatcher, and the js object.
Messages
bang
list
Arguments
y [float]
z [float]
w [float]
In right inlet: A four element list of floating point numbers sets the second operand.
See Also
| Name | Description |
|---|---|
| jit.quat2axis | Quaternion to angle-axis conversion |
| jit.axis2quat | Convert angle-axis to quaternion |
| jit.quat2euler | Quaternion to Euler conversion |
| jit.euler2quat | Convert Euler angles to quaternion |
| jit.anim.node | Perform hierarchical transformation |